
Modern vehicles are nothing short of mobile computers. Instead of mechanical linkages and switches, cars increasingly rely on networks of electronic control units (ECUs) communicating across various bus systems. These bus protocols are the backbone of automotive electronics, connecting sensors, actuators, microcontrollers, infotainment systems, and Advanced Driver-Assistance Systems (ADAS).
Whether you’re an engineer tasked with choosing the right communication protocol or simply curious about how vehicles talk internally, understanding the differences and trade-offs between CAN, LIN, FlexRay, and Ethernet is essential.
In the world of embedded design for automotive systems, picking the right bus impacts everything from performance and cost to reliability and scalability. And that means considering your application’s needs, design constraints, and future growth.
What is an Automotive Bus?
Before jumping into specifics, let’s clarify what an automotive bus is: at its core, a bus is a communication network that lets different parts of a vehicle share data. Think of it like a digital highway where messages travel between electronic components.
In traditional automotive electronics, this communication is vital for everything from engine control and safety sensors to in-car entertainment and vehicle-to-cloud connections.
At a technical level, it’s also a central pillar of embedded system design, particularly in vehicles where real-time performance and safety matter. Whether you’re designing embedded system solutions or selecting components for an ECU, the choice of bus can make or break your system’s performance.
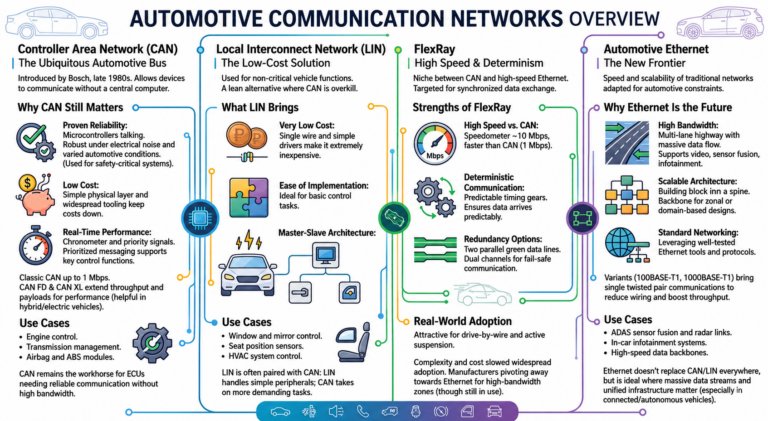
Controller Area Network (CAN)
CAN, or Controller Area Network, is the most ubiquitous automotive bus in the world. Introduced in the 1980s by Bosch, CAN was designed to allow microcontrollers and devices to communicate without a central computer.
Why CAN Still Matters
- Proven reliability: CAN’s robustness under electrical noise and varied automotive conditions makes it ideal for safety-critical systems.
- Low cost: Simple physical layer and widespread tooling keep costs down.
- Real-time performance: Prioritized messaging supports key control functions.
Classic CAN supports up to 1 Mbps, and newer versions like CAN FD and CAN XL extend data throughput and payload sizes for added performance (especially helpful in hybrid and electric vehicle control systems).
Use Cases
- Engine control
- Transmission management
- Airbag and ABS modules
Despite new technologies, CAN remains the workhorse for ECUs that need reliable communication without high bandwidth.
Local Interconnect Network (LIN)
LIN (Local Interconnect Network) is a low-cost communication standard typically used for non-critical vehicle functions. Where CAN might be overkill, LIN is a lean alternative.
What LIN Brings
- Very low cost: Single wire and simple drivers make LIN extremely inexpensive.
- Ease of implementation: Ideal for basic control tasks.
- Master-slave architecture: One master node controls several slaves.
Use Cases
- Window and mirror control
- Seat position sensors
- HVAC system control
LIN is often paired with CAN in production vehicles: LIN handles simple peripherals while CAN takes on more demanding tasks.
FlexRay
FlexRay was developed to fill a niche between CAN and high-speed Ethernet. Offering deterministic, fault-tolerant communication, it was targeted for systems that need synchronized data exchange at high speeds.
Strengths of FlexRay
- High speed vs. CAN: In the range of 10 Mbps.
- Deterministic communication: Ensures data arrives predictably.
- Redundancy options: Dual channels for fail-safe communication.
Real-World Adoption
While FlexRay’s deterministic behavior made it attractive for applications like drive-by-wire and active suspension, the complexity and cost slowed widespread adoption. With the rise of automotive Ethernet, many manufacturers are pivoting away from FlexRay for new designs in high-bandwidth zones (although it’s still in use in some vehicle domains).
Automotive Ethernet
Automotive Ethernet is the new frontier for in-vehicle communications. Ethernet brings the speed and scalability of traditional network technologies into the automotive space, with adaptations for automotive noise, weight, and cost constraints.
Why Ethernet Is the Future
- High bandwidth: Supports video, sensor fusion, and infotainment.
- Scalable architecture: Backbone for zonal or domain-based designs.
- Standard networking: Leveraging well-tested Ethernet tools and protocols.
Ethernet variants like 100BASE-T1 and 1000BASE-T1 bring single twisted pair communications tailored for automotive environments, reducing wiring complexity while boosting throughput.
Use Cases
- ADAS sensor fusion and radar links
- In-car infotainment systems
- High-speed data backbones
Ethernet doesn’t replace CAN or LIN everywhere, but it becomes ideal where massive data streams and unified infrastructure matter, especially in the transition to connected and autonomous vehicles.
How Domain Controllers Are Reshaping Automotive Embedded Architectures
Automotive Networking and Tessolve: Engineering with Expertise
When automotive companies need trustworthy partners for complex vehicle communications and embedded product development, Tessolve stands out. As a global engineering solutions provider with extensive experience in semiconductor design, embedded software, and complete system-level validation, Tessolve helps OEMs and Tier-1 suppliers innovate with confidence.
Backed by ISO 26262 functional safety certification and recent accreditation from Vector as an embedded partner, Tessolve’s teams possess extensive expertise in automotive bus protocols, including CAN, LIN, FlexRay, and Automotive Ethernet. Their end-to-end services span architecture design, AUTOSAR-based software development, MCAL integration, robust testing, and system validation, ideal support for those navigating today’s complex vehicle networks.
Whether you’re launching a new ECU or re-architecting a zonal domain controller, partnering with an experienced embedded system company like Tessolve accelerates development, reduces risk, and ensures your automotive communications are engineered for the road ahead.
Frequently Asked Questions (FAQs)
1. Which automotive bus is most commonly used in vehicles today?
CAN is still the most widely used bus because it’s reliable, cost-effective, and perfectly suited for control-focused ECUs.
2. Why don’t manufacturers use Ethernet everywhere instead of CAN or LIN?
Ethernet is powerful but expensive and unnecessary for simple functions where low-cost, lower-speed communication works perfectly fine.
3. Is FlexRay becoming obsolete in modern vehicle architectures?
FlexRay is used less in new platforms, as many high-speed needs are now handled more efficiently by Automotive Ethernet.
4. Can multiple bus systems exist together in a single vehicle?
Yes, most vehicles use a mix of LIN, CAN, FlexRay, and Ethernet depending on speed, cost, and function.
5. How do engineers decide which bus to use for a new ECU?
They evaluate data speed, safety needs, cost limits, and how the ECU fits into the vehicle’s overall network.